了解详情

包含覆盖全国的路网数据、POI信息,支持基础导航场景的检索、显示、算路等功能。基于要素全面的母库数据,面向不同行业、不同客户的差异化需求,提供导航地图定制化服务。
了解详情
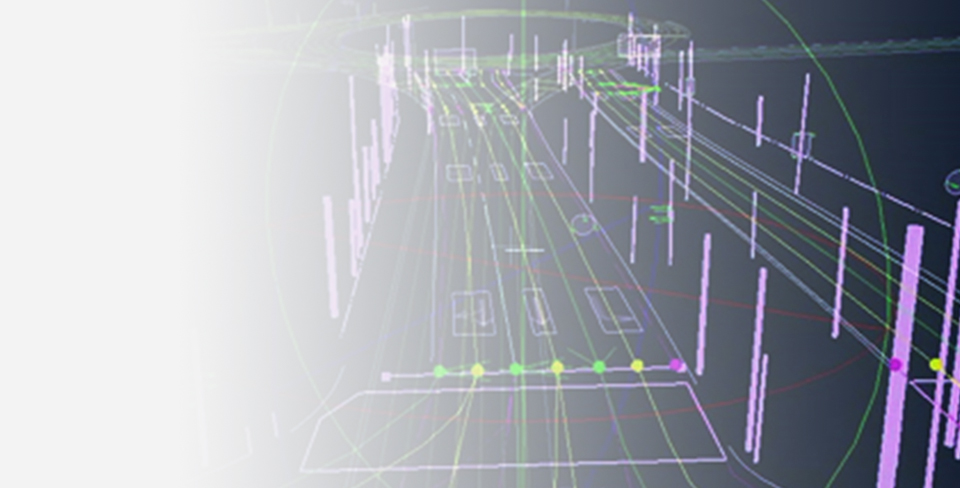
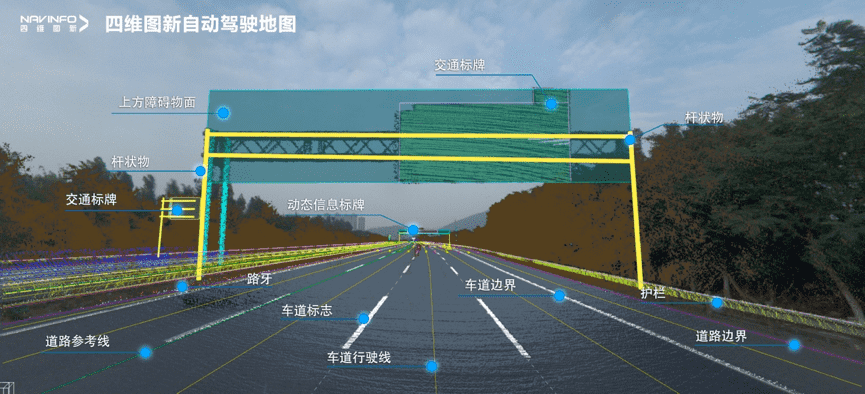
专注于自动驾驶场景、服务于自动驾驶系统的电子地图,厘米级别精度,能够更精准、更详尽地表达道路、车道、路侧设施及地面标识等精细化特征要素。

了解详情
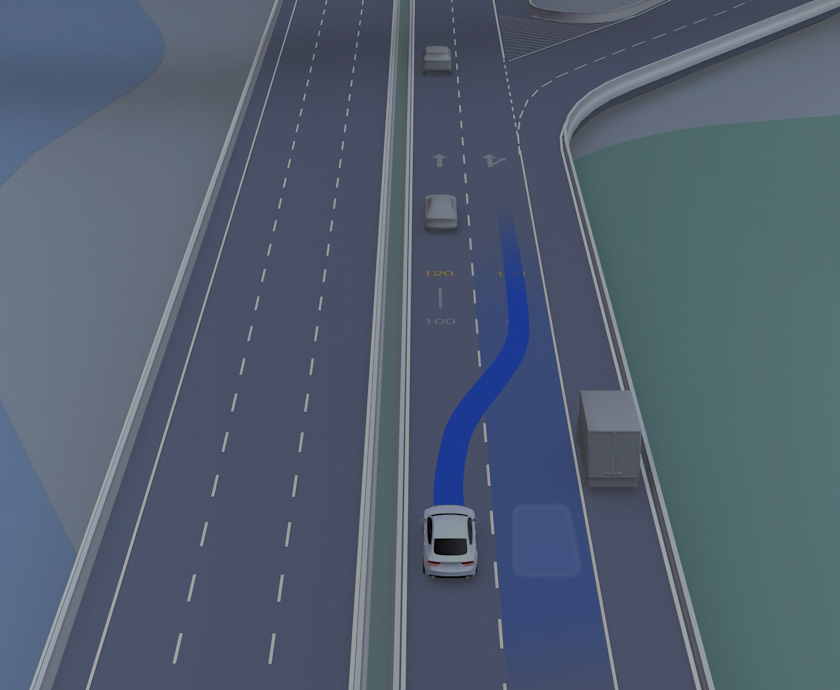
作为车辆“传感器”,可支持实现自适应巡航控制、弯道预警、智能大灯辅助、智能悬挂控制、燃油效率改进等L2辅助驾驶功能。
了解详情
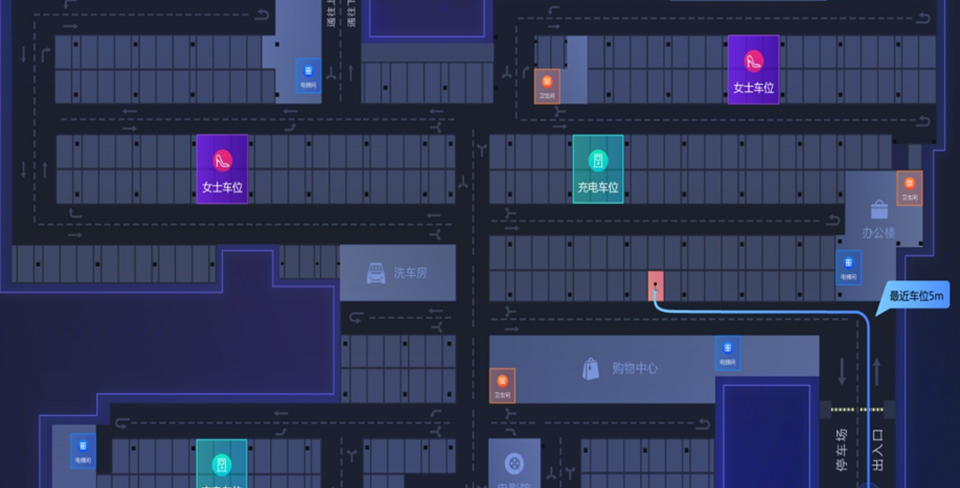
支持面向驾驶者的车位引导、反向寻车、停车场布局查询等功能,以及面向智能汽车的基于多种定位方法的代客泊车解决方案,同时可支持停车场端的智慧运营管理。

面向封闭道路场景、支持L3级别自动驾驶的厘米级精度电子地图,已覆盖全国44万+公里高速公路和城市快速路。
面向城市开放道路场景、支持L2+高级辅助驾驶的米级精度电子地图,已覆盖全国120+城市、30万+公里城市内结构化道路、省道、国道。
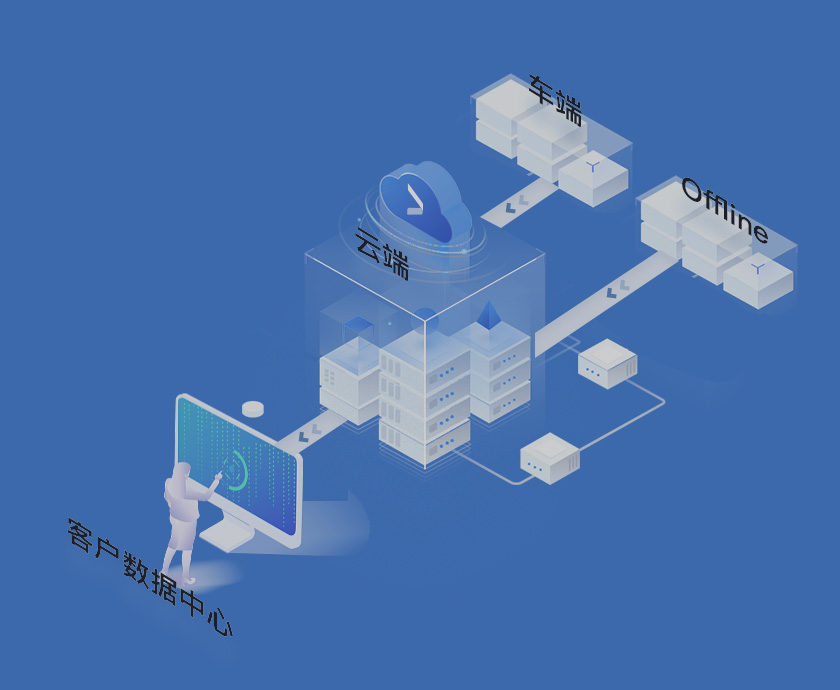
自研自有采集车辆,保障数据精度
建立数据众源生态,确保数据鲜度
自研工具链快速处理数据,实现快速成图
成熟完善的业务体系,确保数据质量
基于定位图层的Landmark,通过与感知结果匹配并计算距离,可以精确计算出车辆当前的位置,与其他技术手段得出的高精度定位结果相互冗余,保证车辆时刻知晓自身位置。
高精度地图提供精确道路面域以及周边设施等信息,并将人行道等对象标记为兴趣区参考,由于兴趣区内的物体会影响自动驾驶系统的驾驶行为,因此提前使自动驾驶车使用比较精确的模型,来检测兴趣区内的物体,并计算每个物体的类别、速度、姿态等信息。
车道级的路径规划和局部路径规划是高精度地图的重要应用,从起点到终点的全局路径规划结果同步到自动驾驶系统,和高精度地图进行匹配参考,实现车道级的路径规划,进而实现平顺、安全的局部路径规划。
高精度地图中准确地记录了各个车道之间的关联关系,如可通行规则和交通规则,在车辆行人交错的复杂路口等自动驾驶场景下,可帮助车辆大幅提升对每一个路权竞争者的行为预测精度,从而得到更优的决策结果。











 2024-10-18
2024-10-18







 邮箱:info@navinfo.com
邮箱:info@navinfo.com