2023-08-07
作者:四维图新
分享:


8月4日-8月6日,第五届华为开发者大会 2023 HDC. Together在东莞举行,四维图新地图中心总经理李翔受邀发表了以《地图创新,赋能智慧出行》为主题的演讲。
大会期间,特别设立了一场关于鸿蒙生态地图方向的研讨,邀请国内外相关企业进行分享,探讨未来智能地图、高精度定位与自动驾驶、智慧出行等领域的发展趋势。四维图新向行业分享了地图数据基座能力,通过地图链接全域场景,实现地图服务多样化。
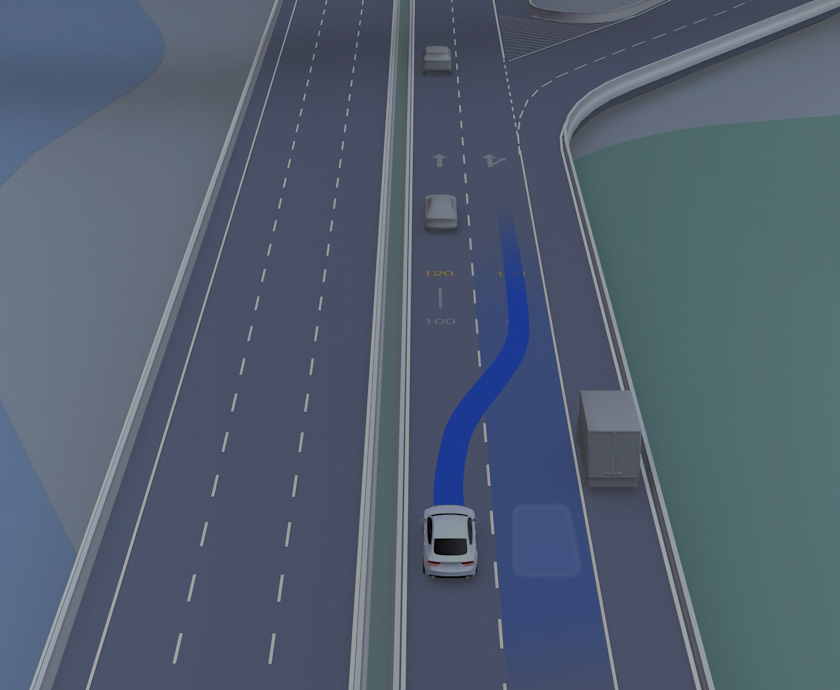
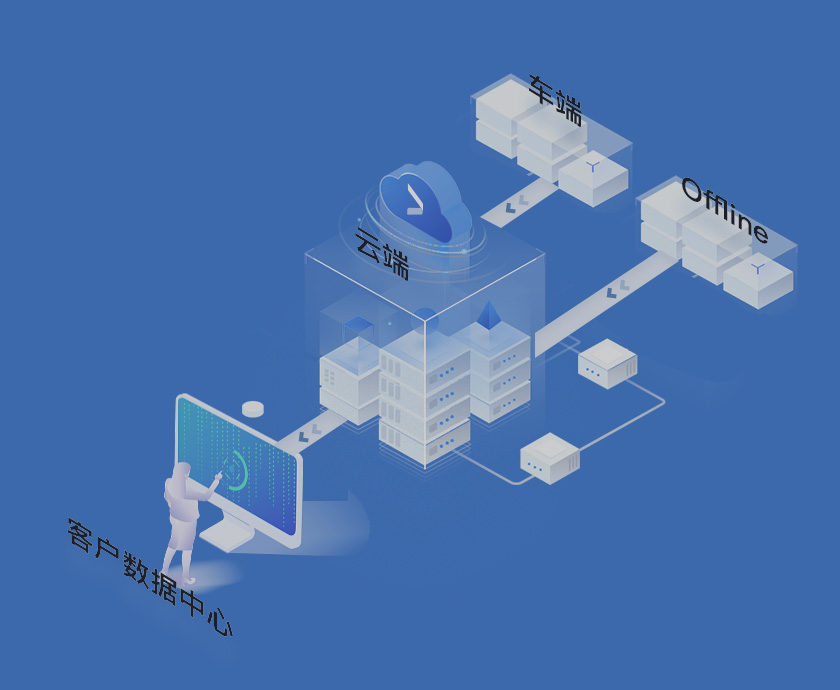
四维图新以地图为载体,叠加动态交通数据,构建丰富的服务内容以及创新的服务形式,助力智能驾驶安全出行。 与传统出行导航相比,四维图新地图数据在检索、显示、规划中加入了更精细、更仿真、动态的数据支撑。丰富详实的POI数据属性,能满足智慧出行中订餐、加油、洗车、充电、停车等多种应用场景,尤其在与天气、油价等动态数据与智舱AI技术相结合后,可为驾乘人员带来更加安全、高效、智能的交互体验。 此外,四维图新地图数据还能支撑智慧物流、智慧园区、智慧城市、智慧景区、智慧港口等场景的应用。 凭借在导航地图及位置服务领域20余年的深耕,四维图新在智能驾驶迅速发展的背景下,通过One Map平台打造出更坚实的数据底座,以数据为驱动,赋能智驾场景出行。 李翔介绍到,为了给用户提供端到全场景体验,四维图新在地图底层数据上提供了多种产品支持L2-L4的全路网覆盖。基于四图合一的One Map生产架构,可以实现多级数据产品在底层拓扑上的一致性,拥有多种人驾、人机共驾以及自动驾驶场景无缝切换的技术能力。 在城市道路智能导航场景中,四维图新车道级地图数据可以还原真实的车道信息,道路元素展现精细丰富。同时,可搭载车道级动态信息,让用户能够沉浸式体验更流畅的智能驾驶。 在车道级导航服务体验之上,四维图新还增强了更高级别的智驾型数据服务产品,支持人机共驾导航。在导航地图数据基础上,引用高精地图的相关信息+动态感知数据,完整还原智驾全流程、全场景、全功能,支持人驾和自驾的无缝切换。有效提升驾驶的智能性与安全性,为新一代出行提供更安心、更精准、更真实的服务。 面向行泊一体化导航场景,四维图新还打造了点到点导航地图服务产品,为用户解决最后一公里泊车难、找车难的问题。 同时,四维图新高精度地图能够为高速道路、城市普通道路提供全场景全息交通信息数字孪生服务,为V2X提供统一的地理信息服务支撑,让管理方拥有交通场景的“上帝视角”,为精准的实时交通信息服务和多重智能驾驶提供安全保障,推动中国特色的自动驾驶方案快速落地。 四维图新依托强大的云上图像识别技术,建成了基于视觉图像+轨迹数据进行导航地图道路快速更新维护的能力,实现了全导航地图道路要素的快速、高自动化维护。在云上图像识别能力的基础上,还进行了端上图像识别能力的迁移和建设,在低算力、低成本的量产级终端上,建立起了满足高精度地图更新维护高质量成图需求。 未来四维图新将建设更坚实的数据底座,赋能智慧出行,助力美好生活。

















 邮箱:info@navinfo.com
邮箱:info@navinfo.com